23.3. Case 22: Balls Tracking with TPBot¶


MakeCode Programming¶
- Click “Advanced” to see more choices in the MakeCode drawer.
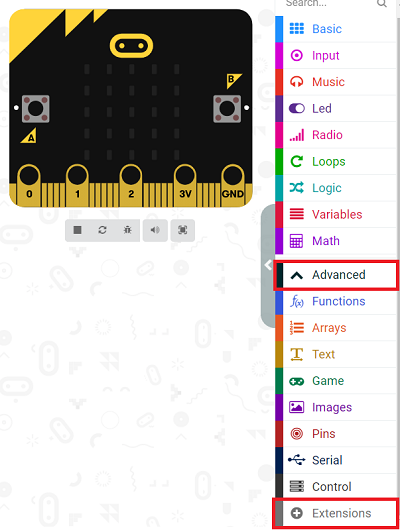
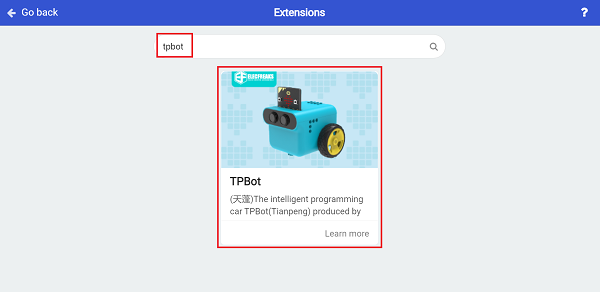
- We need to add a package for programming. Click “Extensions” in the bottom of the drawer and seach with “tpbot” in the dialogue box to download it.
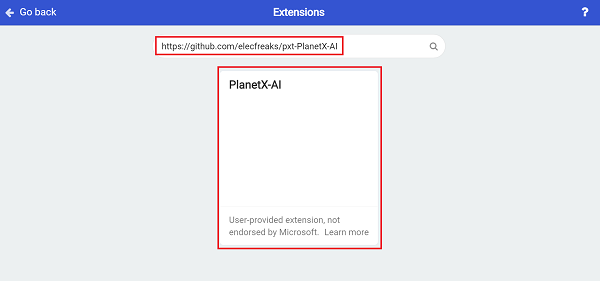
- We need to add a package for programming the AI Lens kit. Click “Extensions” in the bottom of the drawer and seach with
https://github.com/elecfreaks/pxt-PlanetX-AIin the dialogue box to download it.
Sample Code¶
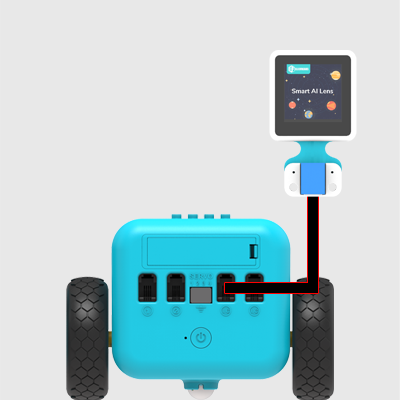
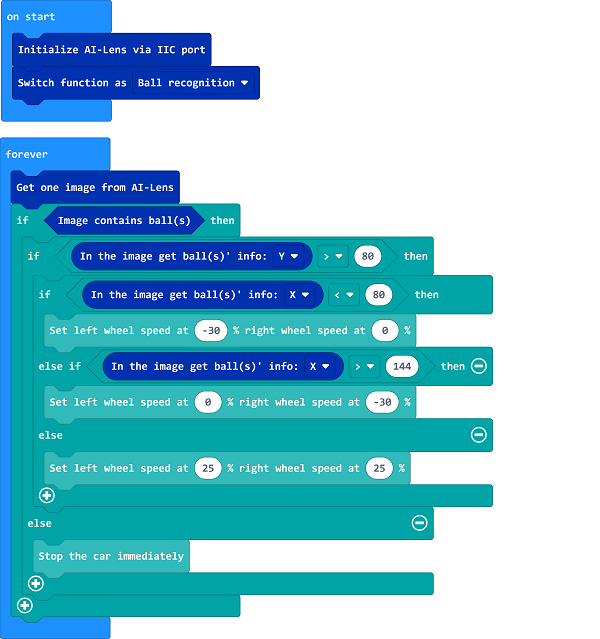
- Initialize the AI lens kit in the On start brick and switch its function to balls recognition.
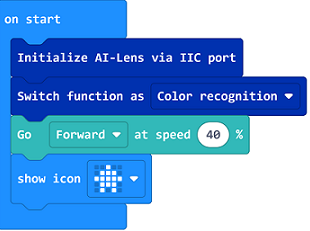
- In forever brick, get an image from the AI lens and adjust TPBot’s movement by the balls recognized in the lens.
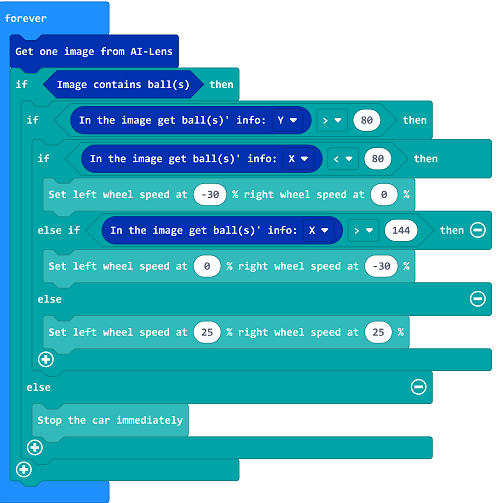
- Complete code:
Link¶
- Link: https://makecode.microbit.org/_TY634U7x5RaH
- You may also download it directly here:
Python Programming¶
Add TPBot extension: https://www.elecfreaks.com/learn-cn/microbitKit/TPbot_tianpeng/TPbot-python.html
Add AI Lens extension: https://www.elecfreaks.com/learn-cn/microbitplanetX/ai/Plant-X-EF05035-python.html
Code¶
from microbit import *
from AILens import *
from TPBot import *
tp = TPBOT()
ai = AILENS()
# Set the function of AI Lens in balls recognition
ai.switch_function(Ball)
while True:
# Get an image
ai.get_image()
buff = ai.get_ball_data()
# "buff[1]" means the Y coordinates data of the ball detected in AI lens
if (buff[1] > 80):
# "buff[0]" means the X coordinates data of the ball detected in AI lens
if (buff[0]< 80):
tp.set_motors_speed(-30,0)
elif (buff[0] > 144):
tp.set_motors_speed(0,-30)
else:
tp.set_motors_speed(25,25)
else:
tp.set_motors_speed(0,0)
Result¶
The TPBot moves with the ball and it stops while walking in the right front of the ball.
Exporation¶
FAQ¶
Q: TPBot doesn’t work with the sample code.A: It is probably due to the lack of battery power, please try adding the speed of the TPBot or replacing with new batteries.Q: The AI Lens is not working, and it does not go to the function page with the sample code.A: Please try replacing with new batteries.