21.1. Cutebot-Item Grabbing Car¶
Purpose¶
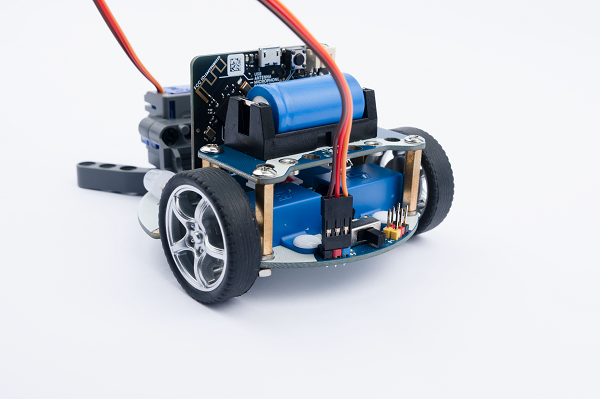
Use a cutebot smart car with mechanical claws to create a car with the ability to grab items.

Software¶
Program¶
Add extensions¶
Click “Advanced” in the drawer of MakeCode to see more choices.
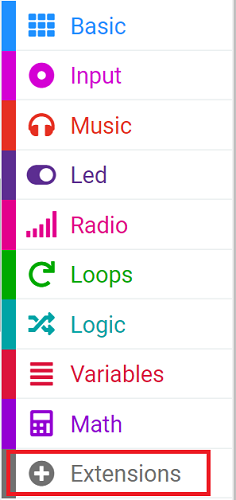
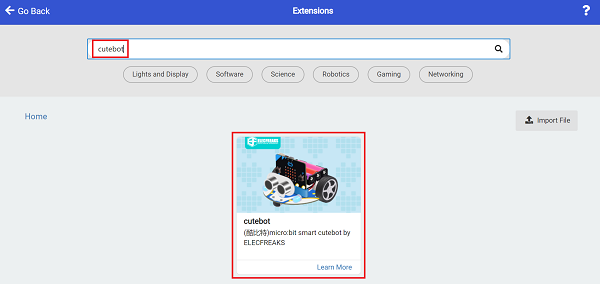
For programming, we need to add a package. Click “Extensions” at the bottom of the drawer and then search Cutebot in the dialogue box to download it.
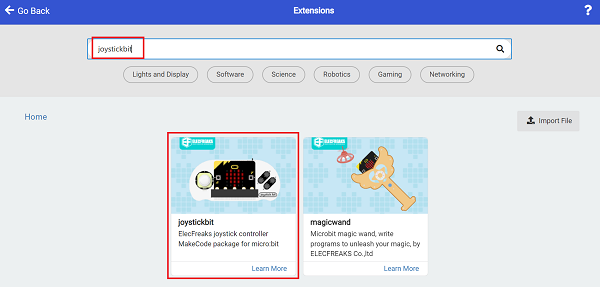
For programming, we need to add a package. Click “Extensions” at the bottom of the drawer and then search Joystick:bit V2 in the dialogue box to download it.
Note: If you get a warning indicating some packages will be removed because of incompatibility issues, you can follow the prompts or create a new project in the menu.
Program¶
Cutebot¶
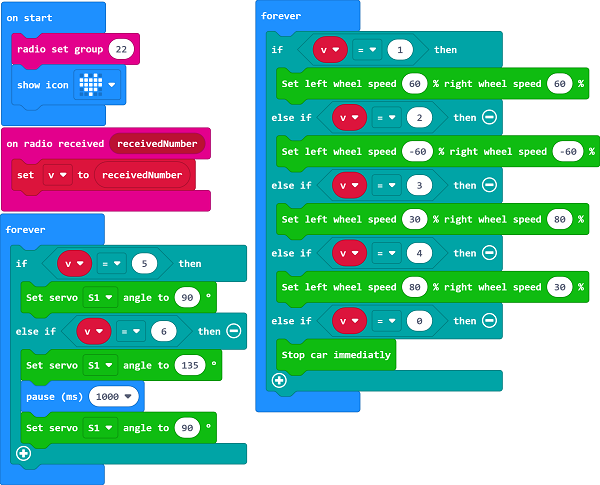
Link: https://makecode.microbit.org/_H4MdUR2yChCp
You can also download the program directly from the following webpage.
Remote control¶
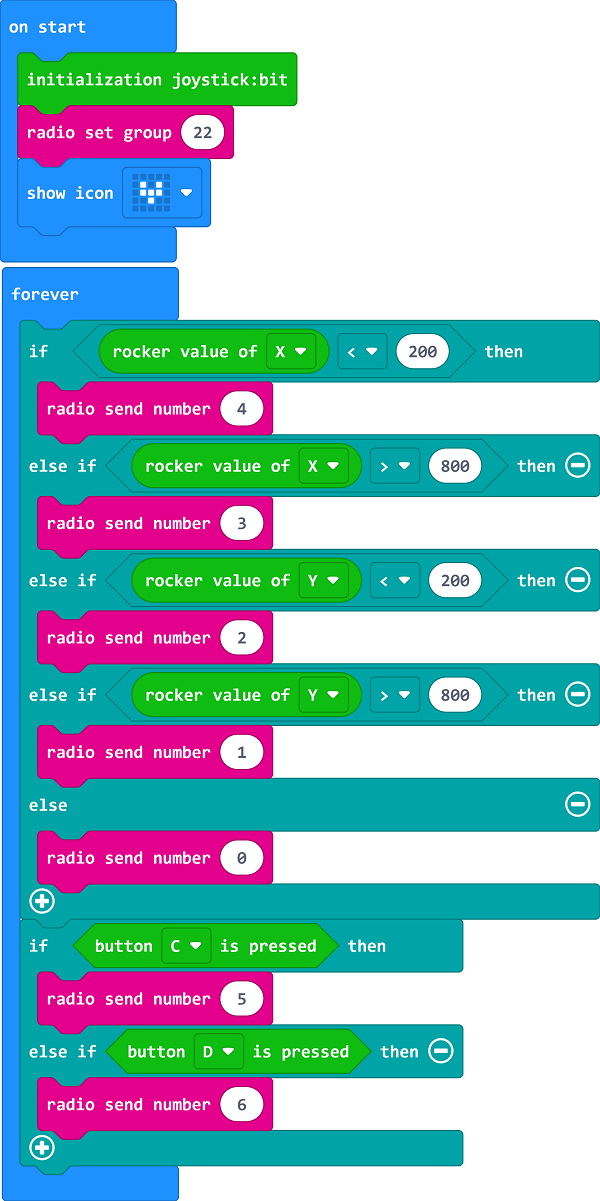
Link: https://makecode.microbit.org/_6fy3K4Xctdgz
You can also download the program directly from the following webpage.
Result¶
If the moving direction of the car is controlled by the joystick, press the C/D button of the remote control to control the opening and grasping of the mechanical claw.