4. Case 01: Running Control¶

4.4. Programming¶
- Click “Advanced” to see more choices in the MakeCode drawer.
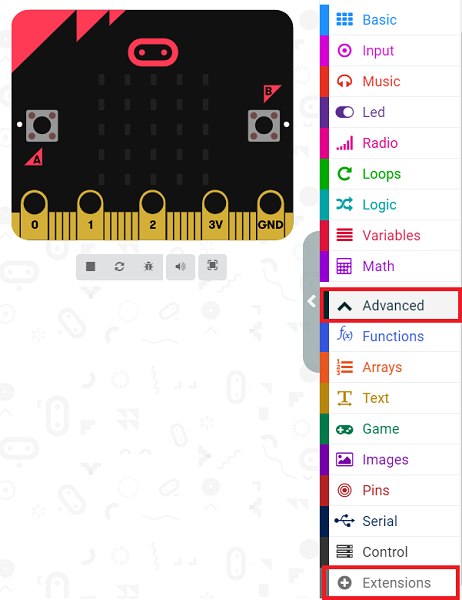
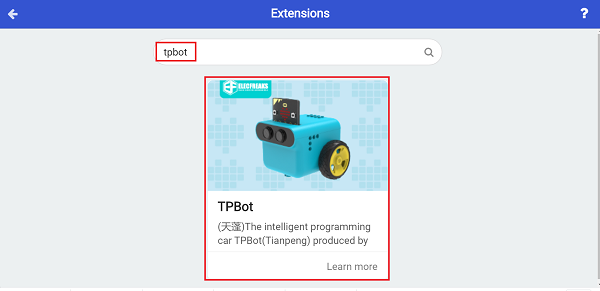
- We need to add a package for programming. Click “Extensions” in the bottom of the drawer and search with “tpbot” in the dialogue box to download it.
Sample A¶
- Drag the brick of setting the speed in both 100 for both wheels of TPBot into the “On Start”.

Link¶
- Link: https://makecode.microbit.org/_0r5C5L029L9m
- You may also download it directly below:
Conclusion¶
- TPBot keeps moving forward.
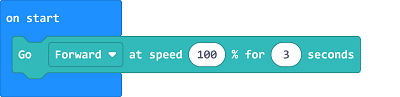
Sample B¶
- Drag and set the brick of moving forward at the speed of 100 and lasting for 3 seconds into the “On Start”.
Link¶
- Link: https://makecode.microbit.org/_XXH3yP66oRRp
- You may also download it directly below:
Conclusion¶
- TPBot moves forward at full speed for 3 seconds and then stops.
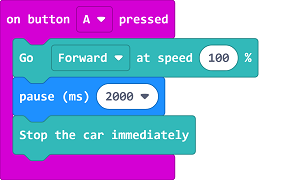
Sample C¶
- Drag and set the brick of moving forward at the speed of 100 into the brick of “while button A being pressed”, then set to pause for 2000ms, and drag the stops immediately brick as the pic says.
Link¶
- Link: https://makecode.microbit.org/_6i4awR07MA7E
- You may also download it directly below:
Conclusion¶
- While button A being pressed, TPBot moves forward at the full speed for two seconds and then stops.