Add extensions
Click “Advanced” in the MakeCode to see more choices.
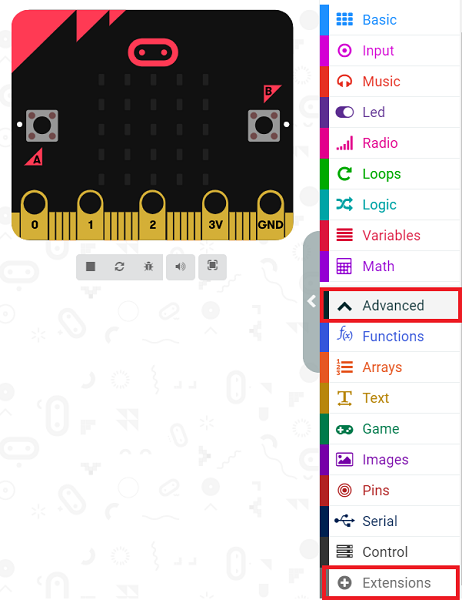
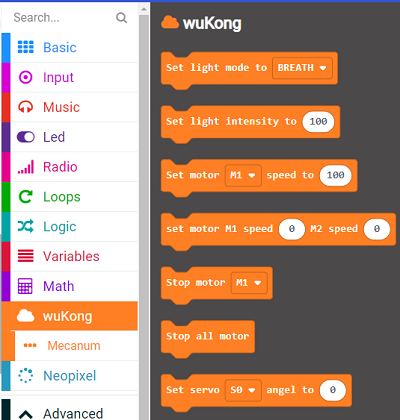
Search with Wukong in the dialogue box to download it.
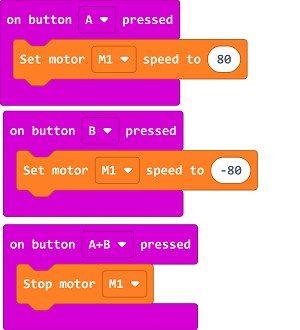
Result
The robot moves forward when button A is pressed, it moves backward when button B is pressed, and it stops moving when button A+B is pressed.