4. Case 02: Line-following Cars¶
4.6. Hardware Connection¶
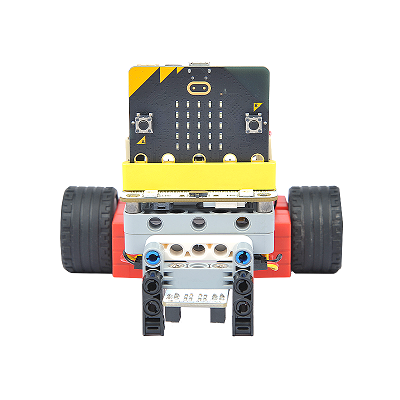
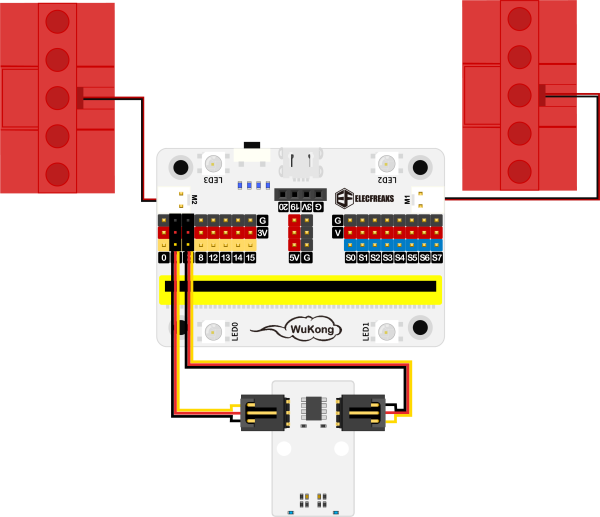
Connect two motors to M1 and M2, the dual line-following sensor to P1 and P2 ports on Wukong breakout board.
Connect two motors to M1 and M2, the dual line-following sensor to P1 and P2 ports on Wukong breakout board.