3. TPBot Samples for Python¶
3.1. Add Python File¶
Download to unzip it: EF_Produce_MicroPython-master Go to Python editor
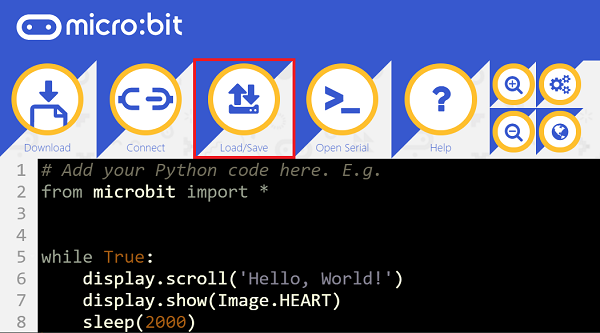
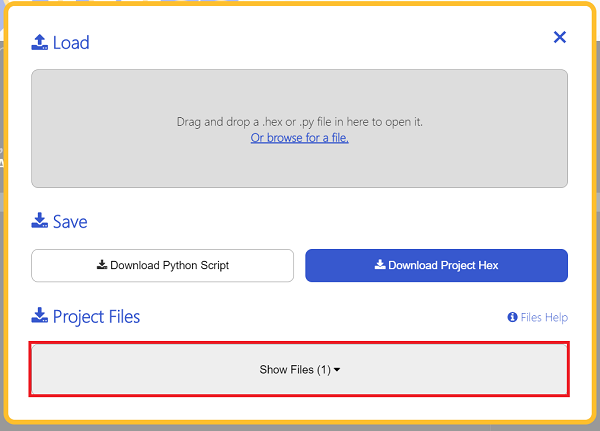
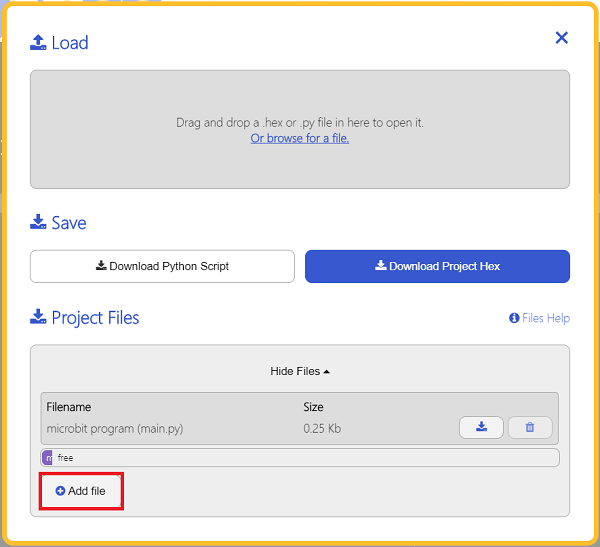
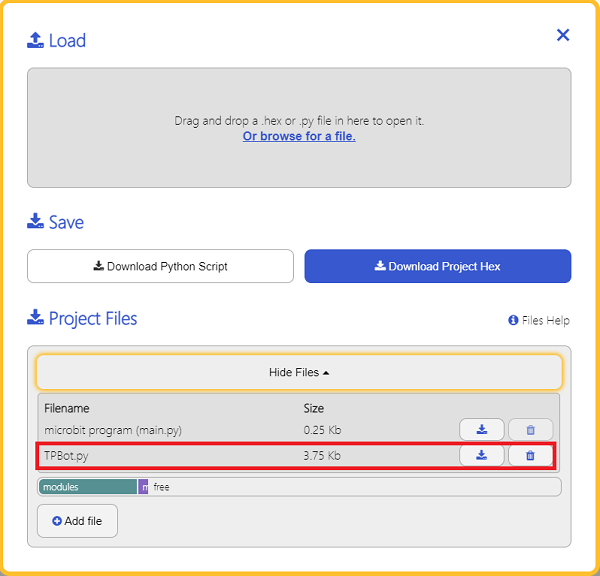
We need to add TPBot.py for programming. Click “Load/Save” and then click “Show Files (1)” to see more choices, click “Add file” to add TPBot.py from the unzipped package of EF_Produce_MicroPython-master.
3.2. Samples¶
Sample 1: Drive the car at a full speed.¶
from microbit import *
from TPBot import *
tp = TPBOT()
tp.set_motors_speed(100,100)
Result¶
The speed of the left and right wheels is at 100, the car moves forward at the full speed.
Sample 2: Turn the headlights on in random colors¶
from microbit import *
from TPBot import *
import random
tp = TPBOT()
while True:
R = random.randint(0,255);
G = random.randint(0,255);
B = random.randint(0,255);
tp.set_car_light(R,G,B)
sleep(500)
Result¶
The headlights light up in different colours at random.
Sample 3: Obstacles avoidance¶
from microbit import *
from TPBot import *
tp = TPBOT()
while True:
i = tp.get_distance(0)
if i>3 and i<30:
tp.set_motors_speed(-50, 50)
sleep(500)
else:
tp.set_motors_speed(50, 50)
Result¶
The TPBot turns its direction once it detects any obstacle ahead of it.
Sample 4: Link-tracking¶
from microbit import *
from TPBot import *
tp = TPBOT()
while True:
i = tp.get_tracking()
if i == 10:
tp.set_motors_speed(10, 50)
if i == 1:
tp.set_motors_speed(50, 10)
if i == 11:
tp.set_motors_speed(25, 25)
Result¶
The TPBot drives along with the black line.
Sample 5: Control the servo¶
from microbit import *
from TPBot import *
tp = TPBOT()
while True:
tp.set_servo(1,180)
sleep(1000)
tp.set_servo(1,0)
sleep(1000)
Result¶
- The servo connecting to S1 continues driving back and forth.